




摘要:
传统的三相PWM整流器需要6个功率开关管,由于同一桥臂的2个开关管之间有直通问题,增加了控制难度,且整体复杂。采用一种半控三相PWM整流拓扑,实现三相整流器,只需使用3个功率开关管,3个开关管都由同一个驱动信号控制,该驱动信号由专用的控制器产生,控制电路简单。使用SiC MOSFET作为功率开关管,搭建了实验样机。实验结果表明,整流器可在较高的开关频率下运行,电感和电容器大幅减少,从而减小了整流器的体积,降低了产品成本,提高了转化效率,且总谐波畸变率较小。
整流器是将交流电变换为直流电的设备,主要应用于工业、交通运输、可再生能源等领域。目前的整流技术可分为无源整流和有源整流两种。无源整流器仅使用无源元件实现整流,结构简单、成本低。常见的无源整流拓扑有六脉冲整流、多脉冲整流等,由于没有主动控制电路调节其工作状态,因此,无源整流器的功率因数低、输入电流低频谐波含量高,会对电网造成污染,另外无源整流器的输出电压不可控。有源整流器采用可控型的开关器件代替无源元件实现整流,通过控制开关器件的导通和关断,使输入电流与输入电压同相位,从而实现较高的功率因数和较低的谐波含量,并获得稳定的输出电压。与无源整流器相比,有源整流器能够减少电网低次谐波污染、提高电网侧的功率因数、输出电压稳定性更高,应用范围日益广泛。
传统的三相PWM整流器需要用到6个功率开关管组成三相桥,有直通问题,且控制较复杂。本文采用了只有3个功率开关管的半控三相PWM整流拓扑实现三相整流器,功率开关管采用SiC MOSFET。SiC器件具有耐高温、高压、导通电阻低的优点,与IGBT相比,SiC MOSFET的开关损耗低、开关速度快、开关频率高,有利于减小系统中电感、电容的体积,提高系统的功率密度,降低系统成本。本文中的SiC MOSFET驱动信号由电流型PWM控制器UC2844产生。电流型PWM控制系统具有电压、电流双闭环,根据反馈电流,调节输出脉宽,同时利用电压外环,最终实现对输出电压的稳定控制。
半控型三相PWM整流器功率开关管数量少,开关管的驱动信号由专用的控制器产生,结构简单,成本低,体积小,总谐波畸变率THD低,整体性能好。
1、拓扑电路图
半控三相有源PWM整流器的拓扑电路如图1所示,上桥臂使用二极管,下桥臂使用SiCMOS⁃FET,与全控型三相PWM整流器相比,半控型三相PWM整流器所使用的功率开关管减少了50%,成本下降。图1中,Lg1~Lg3为电网侧电感,L1~L3为整流器侧电感,C4~C6为滤波电容。电感Lg1~Lg3、电容C4~C6与电感L1~L3构成了LCL滤波器,电容C4~C6同时用于位移因数补偿,因为不增加位移补偿时,电感会导致电流相位滞后。上桥臂D1,D2,D3为二极管,下桥臂S1,S2,S3为SiC MOSFET,分别对下桥臂三路电流进行采样,用于电流型PWM控制器UC2844电流取样的输入。R1~R4为分压电阻,用于电压采样,C1和C2为纹波电容,C3为滤波电容。

2、工作原理
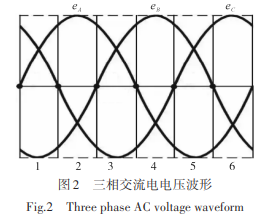
根据三相交流电压eA,eB,eC,将交流电的一个周期分成6个区域,每个区域60°,如图2所示。
半控三相PWM整流器的工作原理如下:下桥臂的3个SiC MOSFET使用同一个驱动信号,当向3个SiC MOSFET施加开通信号后,共有6种工作状态,如图3所示,此时,负载电压由电容电压提供。
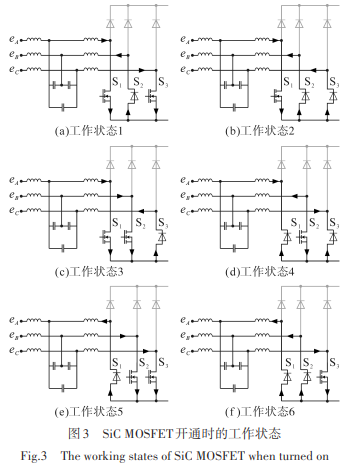
在区域1,A相和C相电压为正,B相电压为负,电流从S1,S3及S2的体二极管流过,工作状态如图3a所示。
在区域2,A相电压为正,B相和C相电压为负,电流从S1及S2,S3的体二极管流过,工作状态如图3b所示。
在区域3,A相和B相电压为正,C相电压为负,电流从S1,S2及S3的体二极管流过,工作状态如图3c所示。
在区域4,B相电压为正,A相和C相电压为负,电流从S2及S1,S3的体二极管流过,工作状态如图3d所示。
在区域5,B相和C相电压为正,A相电压为负,电流从S2,S3及S1的体二极管流过,工作状态如图3e所示。
在区域6,C相电压为正,A相和B相电压为负,电流从S3及S1,S2的体二极管流过,工作状态如图3f所示。
当向3个SiC MOSFET施加关断信号后,SiC MOSFET关断,电流开始续流。

在区域1,上桥臂二极管D1,D3与下桥臂S2的体二极管组成续流通道,向直流侧电容充电,并给负载供电,相应的工作状态如图4a所示。流过二极管D1,D3的电流逐渐减小,其中的一路电流首先减到0,最后另外一路电流和流过S2体二极管的电流共同减小到0。
在区域2,上桥臂二极管D1与下桥臂S2,S3的体二极管组成续流通道,向直流侧电容充电,并给负载供电,相应的工作状态如图4b所示。流过S2,S3体二极管的电流逐渐减小,其中的一路电流首先减到0,最后另外一路电流和流过D1的电流共同减小到0。
在区域3,上桥臂二极管D1,D2与下桥臂S3的体二极管组成续流通道,向直流侧电容充电,并给负载供电,相应的工作状态如图4c所示。流过二极管D1,D2的电流逐渐减小,其中的一路电流首先减到0,最后另外一路电流和流过S3体二极管的电流共同减小到0。
在区域4,上桥臂二极管D2与下桥臂S1,S3的体二极管组成续流通道,向直流侧电容充电,并给负载供电,相应的工作状态如图4d所示。流过S1,S3体二极管的电流逐渐减小,其中的一路电流首先减到0,最后另外一路电流和流过D2的电流共同减小到0。
在区域5,上桥臂二极管D2,D3与下桥臂S1的体二极管组成续流通道,向直流侧电容充电,并给负载供电,相应的工作状态如图4e所示。流过二极管D2,D3的电流逐渐减小,其中的一路电流首先减到0,最后另外一路电流和流过S1体二极管的电流共同减小到0。
在区域6,上桥臂二极管D3与下桥臂S1,S2的体二极管组成续流通道,向直流侧电容充电,并给负载供电,相应的工作状态如图4f所示。流过S1,S2体二极管的电流逐渐减小,其中的一路电流首先减到0,最后另外一路电流和流过D3的电流共同减小到0。
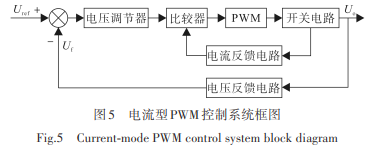
3个SiC MOSFET所使用的共同驱动信号由电流型PWM控制器UC2844产生。系统采用电压电流双闭环控制,内环是电流环,外环是电压环,电流的变化和电压的变化都会使PWM输出脉冲占空比发生变化,电压电流双闭环的控制方式可改善系统的电压调整率,提高系统的瞬态响应速度,增加系统的稳定性。
系统的控制原理是:给定电压与反馈电压经电压调节器运算,电压调节器的输出作为电流给定,电流给定与电流采样信号进行比较,输出占空比可调的PWM信号,从而使输出电压保持恒定。控制系统框图如图5所示。
以UC2844为核心的整流器PWM脉冲生成电路如图6所示。
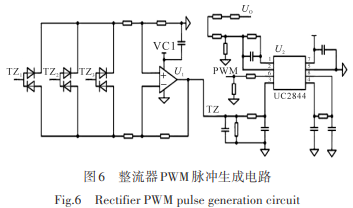
TZ1,TZ2,TZ3是下桥臂三路电流的采样信号,采样信号经二极管取最大值及运放调理后,输入到UC2844的电流取样管脚3。整流器输出的直流电压UO经电阻分压后连接到芯片的电压反馈输入管脚2,与芯片内2.5V基准电压的差经芯片内误差放大器放大后,作为门限电压,与电流取样管脚的输入信号一起输入到芯片内的比较器中。当电流取样管脚的电压超过门限电压后,比较器输出高电平触发芯片内的RS触发器,再经或非门后向外输出低电平,关断开关管,并保持该状态直至振荡器输出脉冲到触发器和或非门为止,PWM信号由芯片的6脚输出。
UC2844的振荡工作频率由4脚与8脚之间所接定时电阻、4脚与地之间所接定时电容设定,本设计实验表明开关管开关频率在50~100kHz之间比较合适。
3、关键器件参数计算
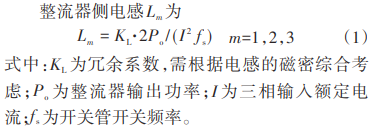
3.1、整流器侧电感计算
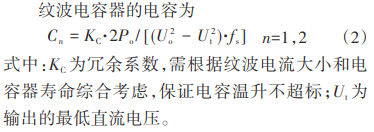
3.2、纹波电容器电容计算
4、实验验证
为验证上述理论分析,搭建了一台额定功率为7.5kW的实验样机,如图7所示,实验设备有三相调压器、示波器、谐波测试仪等。具体参数为:输入交流电压380V,输出电压UO=580V,开关频率50kHz,电容C3=820μF,电容C4=C5=C6=2μF,当冗余系数为1.25时,按照式(1)计算得到整流器侧电感L1=L2=L3=1.66mH,实际选取电感值为1.7mH。功率因数公式为
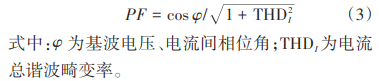
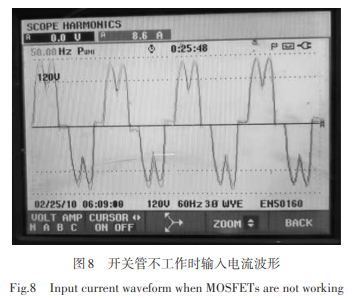
利用调压器将输入电压调至380V,在开关管不工作时,在输出侧加负荷测量输入电流波形,逐步增加至额定负载后,如图8所示,此时工作在无源整流状态下。根据式(3)计算得到功率因数为0.76,因无源整流状态下THDI的值较大,故功率因数小。
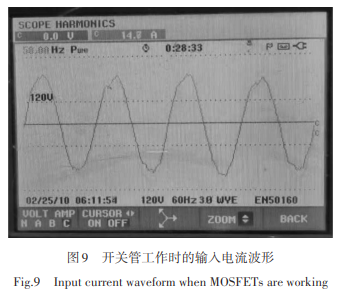
开关管工作时,在额定负载输出条件下输入电流波形如图9所示,通过谐波测试仪测量电流总谐波畸变率THDI为4.5%。根据式(3)计算得到功率因数为0.997。
实验表明,样机具有较低的电流总谐波畸变率和较高的功率因数,实验验证了本文所设计整流器技术路线的可行性。
5、结论
本文设计了一种基于碳化硅器件的三相有源整流器,该整流器的上桥臂使用二极管,下桥臂使用SiC MOSFET,工作在较高的开关频率下,从整体上节省了开关管数量,减小了系统中电感和电容的体积,开关管的驱动信号由专用的电流型PWM控制器产生,电路简单。本设计还存在一些不足之处,后续需进一步优化与完善。本整流器可用在不需要能量回馈的变频器、调速器、整流器等设备中,如电动汽车直流充电桩、工业整流等,尤其在工业整流中有很高应用价值。
如果您有样品申请或者技术支持等需求
我们将为您提供高效、贴心的解决方案!
欢迎来电咨询:135 1009 9916(微信同号)
 ↓ ↓ 点击图片免费领取产品规格书 ↓ ↓
↓ ↓ 点击图片免费领取产品规格书 ↓ ↓ 

想深入了解碳化硅功率器件产品知识?点击→「碳化硅(SiC)课堂」获取详情!












